考试前提
1.有泛雅网络教学平台的账号(学习通账号)
(济南大学泉城学院:ujnpl.fanya.chaoxing.com)
2.已经建好课程,并且学生已经在课程的班级中。
基本流程
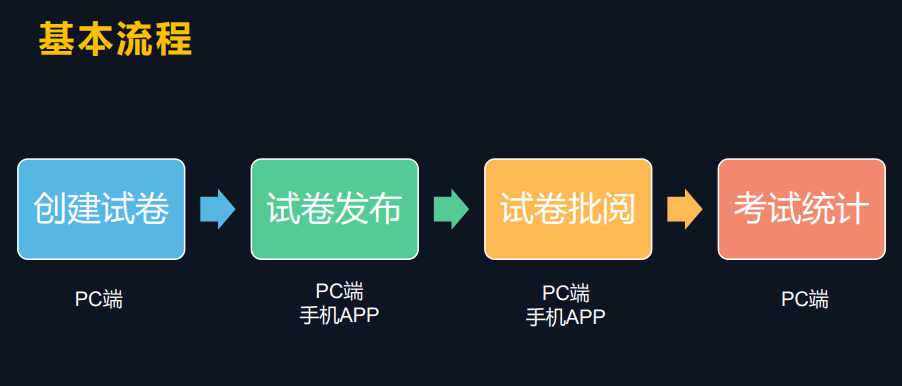
PC端 题库的建设
1.支持批量导入
2.支持图片、音视频等形式出题
3.客观题系统自动批阅,主观题教师批阅
注意事项:
1.考试发布之前尽量检查一下题目的分值设置及客观题的答案设置是否正确。
2.若有学生未完成考试误提交试卷:电脑端支持给学生打回重考。
3.若有学生补考:可选择延长考试截止时间,或者,重新发一份按照选人发放(从试卷库复制一个副本发放副本)。
4.若填空题存在学生回答也对,但是系统判错的情况:考试的“发放设置”中修改填空题为主观题,教师进行批阅。
5.教师批阅若给学生打错分数:电脑端 支持进入学生批阅界面修改批阅分数。
125jz网原创文章。发布者:江山如画,转载请注明出处:http://www.125jz.com/6080.html
 微信扫一扫
微信扫一扫  支付宝扫一扫
支付宝扫一扫