任务2-1创建机器人离线轨迹曲线及路径
任务描述:
在工业机器人轨迹应用过程中,如切割、涂胶、焊接等,学会处理一些不规则曲线,通常做法是采用描点法,即根据工艺精度要求去示教相应数量的目标点,从而生成机器人的运行轨迹。这种方法费时、费力且不容易保证轨迹精度。图形化编程即根据3D模型的曲线特征自动转换成机器人的运行轨迹,这种方法省时、省力且容易保证轨迹精度。本任务学习根据三维模型曲线特征以及RobotStudio自动路径功能自动生成机器人激光切割的运行轨迹路径。
任务目标:
·学会创建工件的机器人轨迹曲线。
·学会生成工件的机器人轨迹曲线路径。
·学会机器人目标点的调整。
·学会机器人轴配置参数调整。
·了解离线轨迹编程的关键点。
·学会机器人离线轨迹编程辅助工具的使用。
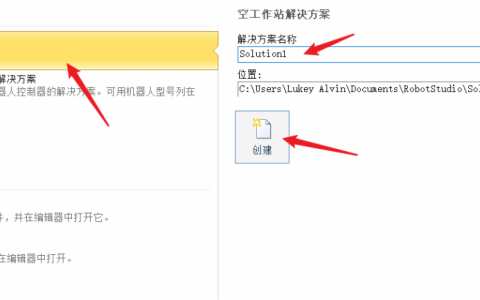
1.创建机器人离线轨迹曲线
基础工作站,导入ABB ZRB 120-3-58-01机器人及轨迹练习平台,注意轨迹练习平台要放在机器人可到达的范围内。
1)创建机器人布局,如图2.1所示。

图2.1
2)在“建模”功能选项卡中单击选择“表面边界”,如图2.2所示。

图2.2
3)单击下面几处创建边界,依次做下面三步。
①首先单击“选择表面”;
②选择要创建边界的平面;
③单击“创建”按钮,如图2.3所示。

图2.3
4)创建机器人使用的工件坐标系,依次单击“基本”菜单下的“其他”,单击“创建工件坐标”系,如图2.4所示。

图2.4
5)建立工件坐标系有以下几个步骤:
①新建工件坐标系并重命名;
②选择工件坐标系下的“取点创建坐标”系;
③选择三点法,并根据提示,在定义的工件坐标系上的X轴上取两个点,如图2.5所示的点A,点B,Y轴上取一个点,如图2.5所示的点C,创建工件坐标系,如图2.5所示;
④单击“Accept”,完成创建,坐标系方向如图2.6所示。

图2.5

图2.6
6)单击“基本”菜单下“设置”中的“工件坐标”系,设置为工件坐标“Wobj_1”,如图2.7所示。

图2.7
7)设置运动指令为“MoveL”,速度为“v100”,转弯半径为“Fine”,工件坐标系为“MyTool”,工件坐标系为“Wobj_1”,如图2.8所示。

图2.8
8)选择捕捉工具并捕捉表面和捕捉边缘,再选择工作台需自动编程的边缘,确定行进轨迹,如图2.9所示。

图2.9
2.生成机器人轨迹路径
1)创建自动路径,单击“基本”菜单下的路径,单击“自动路径”,创建自动路径,如图2.10所示。

图2.10
2)设置自动路径中的参考面为轨迹平台上的参考面,如图2.11所示。

图2.11
3)根据需要,在“近似值参数”选项中选择“圆弧运动”,然后单击“创建”,如图2.12所示。

图2.12
4)创建完成后生成路径“path_10”,如图2.13所示。

图2.13
125jz网原创文章。发布者:江山如画,转载请注明出处:http://www.125jz.com/10381.html
 微信扫一扫
微信扫一扫  支付宝扫一扫
支付宝扫一扫