失败团队的早期症状
- 不出席
- 迟到/早退
- 寻找替代者
- 不断抱怨
- 控制
- 不参与
- 错过最后期限
- 讨论离题
- 缺乏重点
有效团队的特征
- 有明确的目的和目标
- 团队成员为了实现这些目标而共同分担责任
- 测量通向目标的进展情况
- 规模较小(不超过10人)
- 融合各种必要的技能(技术、解决问题以及人际关系)
- 拥有从事这项工作所需的资源
- 就共同工作的基本规则达成共识
- 为每一位成员分配适当的任务
- 制定工作惯例和实施过程并就此达成共识
- 通过倾听、通过建设性和积极地作出反应给予相互支持
- 承认个人和团队取得的成功
- 积极和公开地解决冲突
- 尽可能有效、高效和创造性地实现各个目标
- 在团队内分享领导权
团队常见的失败原因
- 目的和目标不明确
- 目标无法测量
- 界限和责任不明确
- 成员不合适,缺乏所需的关键知识/技能
- 缺乏对成员进行协作和解决问题的培训
- 领导作风和行为不恰当
- 会议效果不佳
- 团队不愿承担责任
- 奖赏/认可更偏重于个人
- 职能性阻力和权术
- 抑制个人主义和个人的创造性
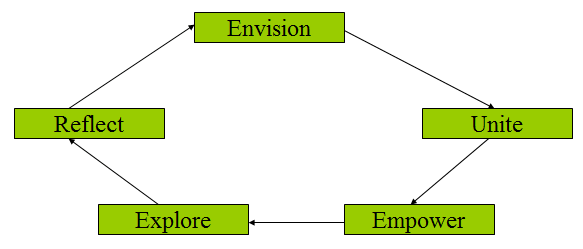
团队组织的模型
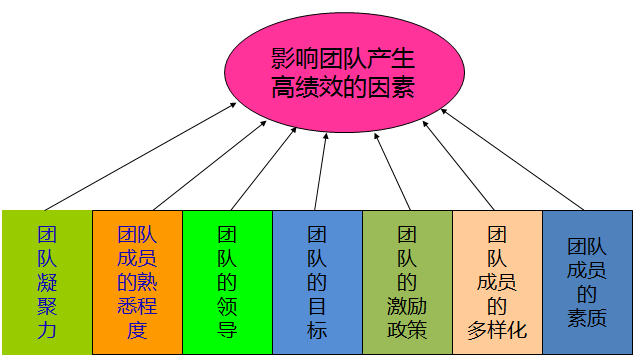
影响团队产生高绩效的因素
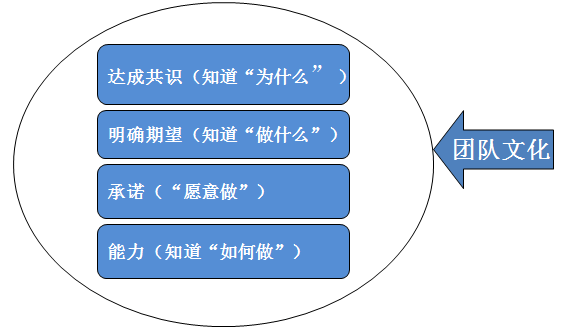
团队成员达成绩效之必备
高效团队管理课程二:团队成员的动力、知识、能力、文化、价值观(免费分享)
高效团队管理课程四:如何打造团队凝聚力,提高团队士气(免费分享)
125jz网原创文章。发布者:江山如画,转载请注明出处:http://www.125jz.com/6414.html
 微信扫一扫
微信扫一扫  支付宝扫一扫
支付宝扫一扫