2017版(最新版)北大核心期刊目录原书扫描版。
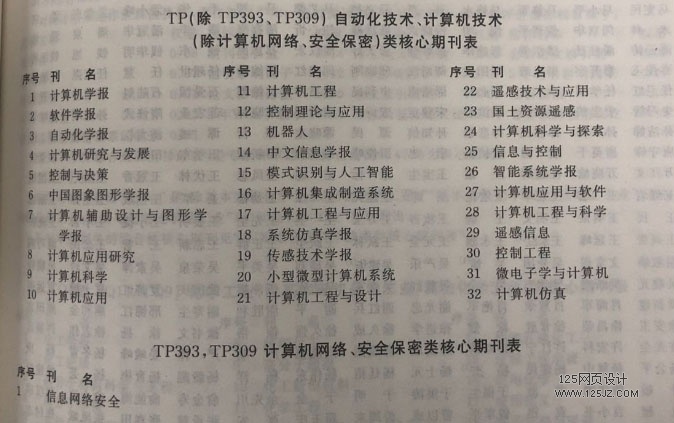
TP(除TP393、TP309)自动化技术、计算机技术类北大核心期刊表
1、计算机学报
2、软件学报
3、自动化学报
4、计算机研究与发展
5、控制与决策
6、中国图象图形学报
7、计算机辅助设计与图形学学报
8、计算机应用研究
9、计算机科学
10、计算机应用
11、计算机工程
12、控制理论与应用
13、机器人
14、中文信息学报
15、模式识别与人工智能
16、计算机集成制造系统
17、计算机工程与应用
18、系统仿真学报
19、传感技术学报
20、小型微型计算机系统
21、计算机工程与设计
TP393,TP309计算机网络、安全保密类北大核心期刊表
1、信息网络安全
125jz网原创文章。发布者:江山如画,转载请注明出处:http://www.125jz.com/3029.html
 微信扫一扫
微信扫一扫  支付宝扫一扫
支付宝扫一扫